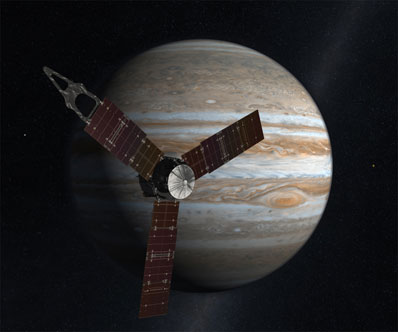
Scott Bolton مخترع اصلی Juno
درمرکز تحقیقات جنوب غربی San
Antonio چنین اظهار کرد: Juno اساساً
یک تانک کاملاً مجهز جهت سفربه ژوپیتر می باشد و در ادامه افزود: مغز Juno
بدون سپر محافظتی اش و یا جهش تشعشعی اش در اولین دقایق
هنگام نزدیک شدن به ژوپیتر ذوب خواهد شد.
یک میدان مغناطیسی قدرتمند
که مشابه ضعیف تر آن در اطراف زمین وجود دارد ژوپیتر را از ذرات باردار
خورشیدی محافطت می کند.الکترونها٬ پروتونها و یونهای اطراف
ژوپیتر بر اثر چرخش فوق العاده سریع سیاره انرژی می گیرند و با سرعتی
تقریباً برابر با نور حرکت می کنند.
تسمه های تشعشعی ژوپیتر
شکلی شبیه دوناتهای بسیار بزرگ اطراف منطقهً استوایی سیاره دارند و به
امتداد تقریباً 650٬000 کیلومتر (400٬000 مایل) ماورای قمر Europa
خارج از راس توده ژوپیتر کشیده شده اند. Bill Mc Alpine مدیر کنترل تشعشعاتی Juno
در آزمایشگاه Jet
Propulsion ناسا در Pasadena, Calif گفت:
Juno بمدت 15ماه به دور ژوپیتر می گردد و
سفینه باید با تعادل بیش از 100 میلیون اشعه ایکس دندانی مقاومت کند. به
همان روشی که موجود زنده نیاز به محافطت ارگانهایش در طول مدت آزمایش اشعه
ایکس دارد ٬ ما باید مغز و قلب Juno را
نیز حفط کنیم.
حال تدبیر چیست؟
به Juno نوعی از
کف سربی شش ضلعی در مسیر استروییدها داده شد. با هدایت از JPL
و جستجوگر اصلی ٬ مهندسین در سیستم های فضایی Lockheed Martin یک جهش تشعشعاتی ویژه ای از جنس
تیتانیوم برای توپ الکترونیکی متمرکز طراحی کرده و ساخته اند. درحالیکه
مواد دیگری وجود دارند که بلاکر های تشعشعاتی خوبی میتوان با آنها ساخت٬
مهندسین تیتانیوم را انتخاب می کنند چراکه سرب برای مقاومت در برابر
ارتعاشات پرتاب بسیار نرم بوده (و مناسب نمی باشد) و برخی مواد
دیگری نیز کار کردن با آنها بسیار سخت می باشد.
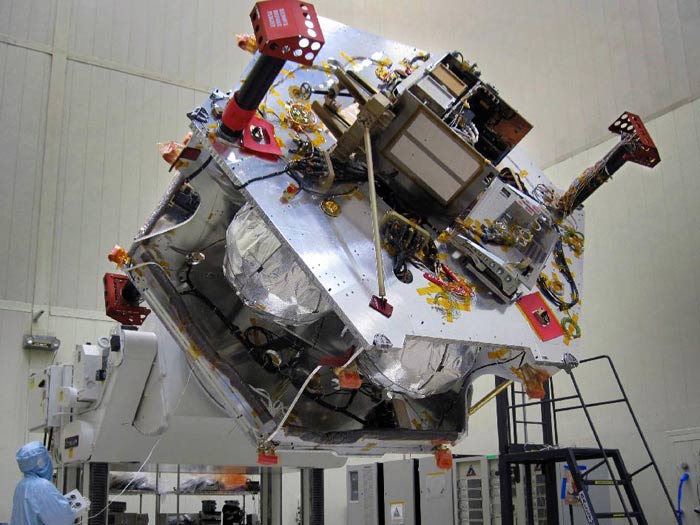
هر دیواره تیتانیومی
تقریباً یک متر مربع مساحت ٬ حدود 1 سانتی متر ضخامت ( یک سوم اینچ ) و 18
کیلوگرم حجم دارد. این جعبه تیتانیوم اندازه ای به میزان بدنه SUV
دارد که جعبه نگهداری داده ها و فرمان Juno ( مغز سفینه فضایی) ٬ واحد توزیع داده ها و قدرت (قلب
آن) و حدود 20 مونتاژ الکترونیکی را دربرگرفته است. وزن کل جهش حدود 200
کیلوگرم می باشد.
این جهش به منظور پیش گیری
کامل هر الکترون Jovian ٬یون و یا پروتون از ضربه زدن به سیستم
طراحی نشده است اما بطور برجسته تشعشع موثر کهنی را که روی الکترونیکها در
طول مدت ماموریت دارد کاهش می دهد.
بولتن گفت: جهش تشعشع
متمرکز در نوع خود اولین است و ما اساساً آنرا از ground
up طراحی کرده ایم.
زمانیکه سفینه فضایی Galileo
ناسا از سال 1995 تا 2003 به ژوپیتر سفر کرد٬ الکترونیک
های آن با ترکیبات مخصوصی که برای مقاومت در برابر تشعشعات طراحی شده بودند
حفاظت گردیدند. همچنین Galileo درجاییکه
Juno فعالیت می کند نیازی به طی کردن سخت
ترین مناطق تشعشع ندارد.
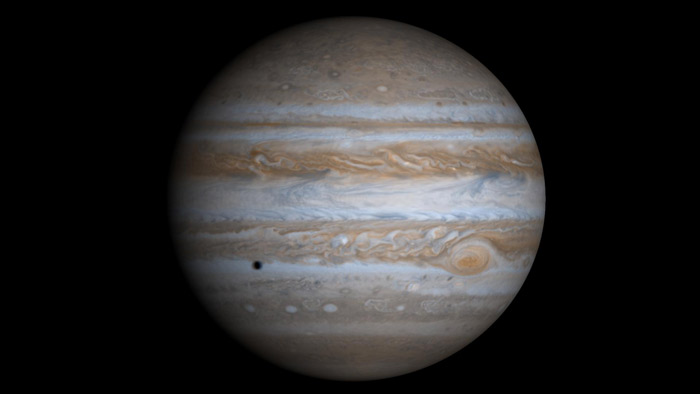
معمولا مشتری چهارمین شی
درخشان آسمان میباشد اگرچه گهگاه بهرام درخشانتر بهنظر میآید. جرم
مشتری ۲٫۵ بار از مجموع جرم سیارات سامانه خورشیدی بیشتر است. جرم مشتری
۳۱۸ بار بیشتر از جرم زمین است. قطر آن ۱۱ برابر قطر زمین است. مشتری
میتواند ۱۳۰۰ زمین را درخود جای دهد. میانگین فاصله آن از خورشید در حدود
۷۷۸ میلیون و ۵۰۰ هزار کیلومتر میباشد یعنی بیشتر از ۵ برابر فاصله زمین
از خورشید. ستارهشناسان با تلسکوپهای مستقر در زمین و ماهوارههائی که در
مدار زمین میگردند به مطالعه مشتری میپردازند. ایالات متحده تا کنون ۶
فضاپیمای بدون سرنشین را به مشتری فرستاده است. در ژوئیه ۱۹۹۴، هنگامی که
۲۱ تکه از دنباله دار شومیکر-لوی ۹ با اتمسفر مشتری برخورد نمود
ستارهشناسان شاهد رویدادی بسیار تماشائی بودند. این برخورد باعث انفجارهای
مهیبی شد که بعضی از آنها قطری بزرگتر از قطر زمین داشت. مشتری گوی غول
پیکری از مخلوط گاز و مایع است و احتمالا مقداری سطح جامد دارد. سطح سیاره
از ابرهای ضخیم زرد، قرمز، قهوهای و سفید رنگ پوشیده شده است. مناطق روشن
رنگی «ناحیه» و قسمتهای تاریک تر «کمربند» نامیده میشوند. کمربندها و
ناحیهها به موازات استوای سیاره قرار دارند.
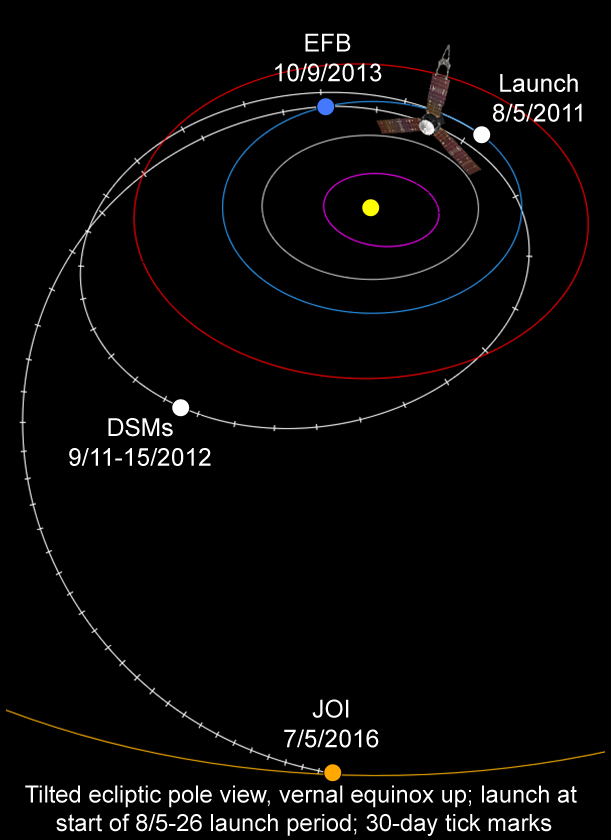
اما Juno
تنها به جهش تشعشعی اتکاء نمی کند. دانشمندان مسیری را
طراحی کرده اند که Juno را به
اطراف قطبهای ژوپیتر می رساند که کمترین زمان ممکن را صرف سوزاندن تسمه های
تشعشعاتی اطراف خط استوایی ژوپیتر میکند. همچنین مهندسین از
سیستم ها و مدارات الکترونیکی استفاده می نمایند که تاکنون در محیط های
تشعشعی شدید تر و خشن تر از زمین مانند Martin
آزمایش شده اند اما با این حال میزان تشعشعات در ژوپیتر
بسیار فراتر از آن است. بخش هایی از مدارات از تانتالیوم یا تنگستن٬ دیگر
فلز مقاوم در برابر تشعشع ساخته شده اند.برخی از مونتاژها نیز از روش های
ترکیبی خاص خودشان محافظت می شوند.
بسته بندی مونتاژها در
کنار یکدیگر بنوعی به آنها اجازه محافظت از مجاورت خود را نیز می دهد.
بعلاوه مهندسین مس و نوارهای استیل ضدزنگ را مانند زره زنجیره ای در اطراف
سیمهای متصل شده به بوردهای الکترونیکی و سایر قسمتهای سفینه می پیچند.
به گفته مک آلپین، JPL
قطعات جهش را در محیط تشعشعی مشابه با ژوپیتر
امتحان می کند تا مطمئن شود این طرح قادر به دربرگرفتن فشار پرواز فضایی و
محیط ژوپیتر می باشد یا خیر.
آنها قطعات سفینه را در
وان آزمایش مخصوص با آستر سربی با اشعه گاما از قرصهای کبالت رادیواکتیو
شکل می اندازند و نتایج را برای هیئت اعزامی Juno تجزیه و
تحلیل می کنند.
این جهش در 19 ماه می در
اتاق استریل high_bay Lockheed Martin با مقیاس
نیروی محرکه Juno بالا برده شد.
البته آزمایشات بیشتری نیز
پس از مونتاژ تمام قطعات و تکمیل فضاپیما صورت خواهد گرفت. فرایند آزمایش و
مونتاژ نصب پانل های خورشیدی نیز گمان میرود که تا بهار سال آینده طول
بکشد. این نخستین فضاپیمای ارسالی به ژوپیتر می باشد که تماماً بر اساس
پانل های انرژی خورشیدی پیاده سازی و ساخته شده است. چنین
انتطار می رود که Juno در آگوست سال 2011 به راه انداخته شود.
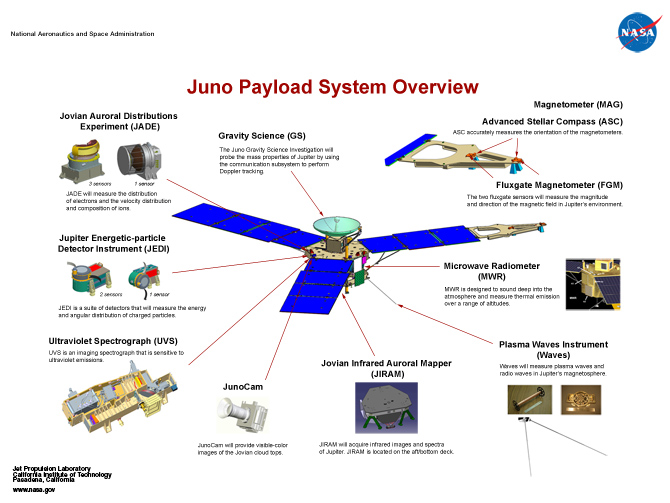
Tim Gasparrini٬ مدیر برنامه Lockheed Martin گفت: مونتاژ Juno
بخوبی پیش می رود. ما شماره پرواز و ترکیبات
مربوط به دستگاههای خودکار سفینه در واحد آزمایش را داریم که روی جهش
تشعشعاتی برای آزمایش سیستم نصب شده اند و همچنین نخستین ابزار یعنی
رادیومتر مایکروویو را نیز نصب کرده ایم.
Scott Bolton ٬از موسسه تحقیق
جنوب غربی در تگزاس گفت: JPL ماموریت Juno
را برای جستجوگر اصلی اداره می کند. سیستم های فضایی Lockheed Martin در Denver٬ Colo٬ این سفینه را
می سازد و آژانس فضایی ایتالیا در ساخت یک ابزار طیف سنج مادون قرمز و بخشی
از آزمایشات علمی رادیوئی همکاری می کنند.
ترجمه
نعیمه افشار از NASA













 خوش مشرب
خوش مشرب مژه بلند
مژه بلند لب قرمز
لب قرمز چشم سبز
چشم سبز البته از نوع روبوتيکی
البته از نوع روبوتيکی آن از هفته آينده کار خود را در دفتر پذيرش کالج سلطنتی لندن آغاز خواهد کرد.
آن از هفته آينده کار خود را در دفتر پذيرش کالج سلطنتی لندن آغاز خواهد کرد.
